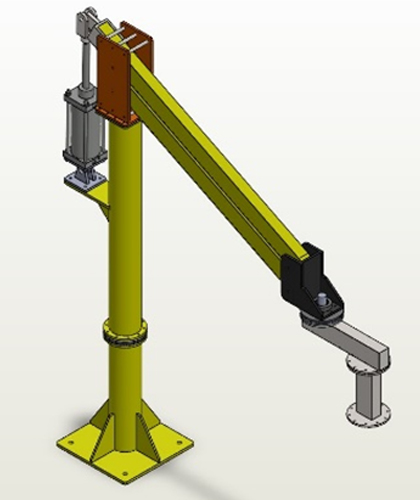
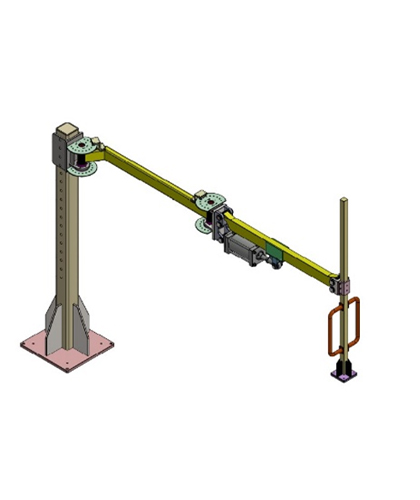
Manipulators are robotic arm designed to help operators lift, maneuver and place parts that are too heavy, large or otherwise too difficult for single operator to handle. They are widely used in various industries such as manufacturing, assembly, material handling, palletizing, etc.
Designed & Developed by ![]()